Arduino Playground by Warren Andrews is a great collection of Arduino projects. With an ever-growing collection of Arduino books on the market, it is getting difficult for a book to stand out. Many books are introductory project books to get someone up and running. The projects and programming in most books is simple and offers little to a more advanced user.

Sample page posted with permission from No Starch Press
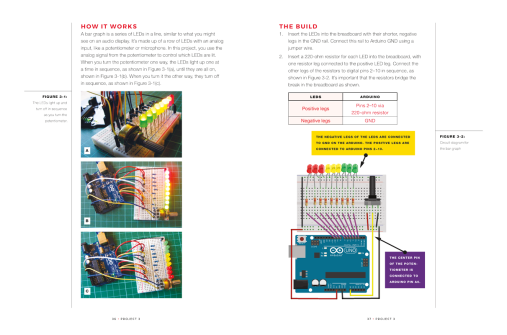
Arduino Playground focuses on more advanced projects and cod that is often pages long. The sample page, right, shows the end of a program and some brief discussion. While the code printed in the book lacks comments, important lines are marked with numbers. This makes it very easy to identify critical lines of code and the expanded discussion following the code provides lots of insight.
The sample page on the right also mentions shields. Arduino shields are expansion boards for the basic microcontroller. These boards can add everything from sound to motors to sensors. Many Arduino projects use one or more shields. For example, the project referenced in this sample page discusses a motor controller shield. Arudino Playground goes into good detail to discuss how things things are electrically wired. The author discusses power loads and various votlage supply rails. This information is critical to more-complex projects and is a welcomed addition to this book.
Most Arudino books focus on the Arduino Uno board, the most famous form factor of the popular microcontroller. Arduino Playground uses the right board for the right project. This means some projects use the compact Arduino (my preferred board). This board requires a bit more work as the user needs to solder wires to the various pads. The sample page below shows a nice project photo with the Arduino nano and various modules and plugs. However, even with cool projects, the book does not do well to promote the projects on the cover or early in a chapter. The lack of color print also detracts from the promotion many of these projects deserve.

Sample page posted with permission form No Starch Press.
Overall I really liked the Arduino Playground. I enjoyed working with more than just an Arduino Uno. The scope of the book is great for those looking for something a little more complex than the range of starter books already on the market. However, this book is in a very crowded market and it lacks the color print of other Arduino books. While it certainly is a good book content wise, I think it could have been even stronger with color printer and better presentation of the projects.